




Vorwort
Wer sich mit dem Erstellen von Videos beispielsweise für Social Media auseinandersetzt, der oder die merkt schnell, dass man für schöne Aufnahmen manchmal etwas Zubehör benötigt. Sei es das passende Licht, die doch etwas teurere Kamera oder ein externes Mikrofon. Ähnlich ist es, wenn man gleichmäßige Kamerafahrten machen möchte. Da gibt es zum Beispiel Gimbal, die unrunde Bewegungen ausgleichen können. Um meine Projekte in Szene zu setzen, benötigte ich in der Vergangenheit aber häufig eher langsame und gleichmäßige Fahrten von links nach rechts oder vice versa.


Somit war die Idee für einen Kamera Slider geboren. Zugegeben: Sonderlich kreativ ist das nicht, gibt es im Netz doch bereits einige solcher Projekte. Aber da ich etwas auf dem Weg lernen wollte und die anderen Projekte alle eine gewisse Komplexität mit sich bringen, habe ich bei 0 angefangen. Eine Erkenntnis vorab: Viel weniger Komplex ist mein Projekt leider auch nicht geworden. Deshalb, solltest du den Slider nachbauen wollen, bedenke folgendes:
Das bekommst du:
- Alle 3D-Dateien, um den gezeigten Slider nachzubauen
- Infos zu allen von mir verwendeten Teilen
- Einen Schaltplan, wie alles zu verkabeln ist
- Zahlreiche Bilder in dem Beitrag hier, die zeigen wie ich alles zusammengesetzt habe
- Mit etwas Ehrgeiz am Ende einen Slider, der insbesondere bei langsamen Fahrten schöne und ruckelfreie Videos ermöglicht
Aber das solltest du mitbringen:
- Einen 3D-Drucker und Filament
- Etwas Elektronikerfahrung, damit verbunden Lötkolben und was man halt so braucht
- Und vermutlich muss man hier und da ein bisschen mitdenken und: Ich bin Hobbybastler, da ist also vermutlich hier und da Optimierungspotential
Wenn das passt: Viel Erfolg! Wenn nicht: Vielleicht kannst Du dir aus den Infos ja dennoch ein paar Informationen für dein eigenes Projekt rausziehen. Vielleicht willst Du ja auch etwas ganz anderes bauen.
Teileliste
Für den Druck habe ich beliebiges PLA-Filament verwendet. Nehmt einfach das, mit dem ihr am besten klarkommt. In meinem Fall hatte ich da keine besonderen Anforderungen dran.
Elektronikkomponenten
- ESP32 Wroom 32D
- ST7735 1.77″ TFT-Display
- KY-040 Rotary Encoder
- Nema 17 Schrittmotor
- TMC2208 V1.2 Schrittmotor-Treiber
- 4.7k Widerstände
- 100 μF Kondensator
- Sperrdiode (optional aber empfohlen, siehe Hinweistexte bei „Die Schaltung„)
- 2 Mikroschalter (Endschalter mit Rollenhebel)
- Buck-Konverter um 12V auf 5V zu bekommen
- Custom-PCB (siehe ebenfalls Abschnitt „Die Schaltung„)
Weitere Teile
- M3 & M5-Schrauben unterschiedlicher Länge
- M3 & M5 Muttern, selbstsichernd
- Magentkonnektoren (siehe mein Tiktok dazu)
- 1/4″ Zoll Kamera Befestigungsschraube
- 1/4″ Zoll Mutter für Stativbefestigung
- 3D-Druckerrollen mit Kugellager
- 3D Drucker Zahnriemen Satz
- Riemenscheibe mit 20 Zähne
- Nutensteine M5
- Diverse Litze
Die 3D-Teile
Alle Teile sind von mir selbst erstellt – bis auf den Aufsatz für den den Rotary Encoder KY-040. Da hab ich ehrlicherweise bei Thingyverse nach dem Erstbesten gesucht. Die Teile sind in einigen Fällen ohne, teilweise mit Supports zu drucken. Ich habe in der Regel ein Infill von 60% verwendet. Ich denke es geht auch weniger.
Ihr findet sämtliche der folgenden 3D-Designs in dieser ZIP-Datei zum Download:
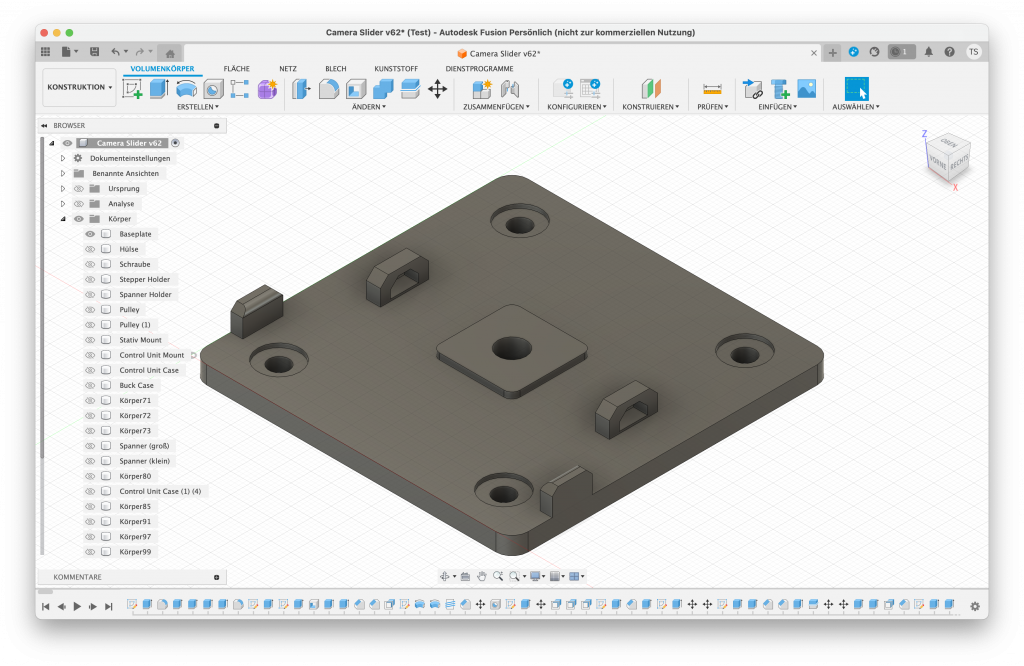
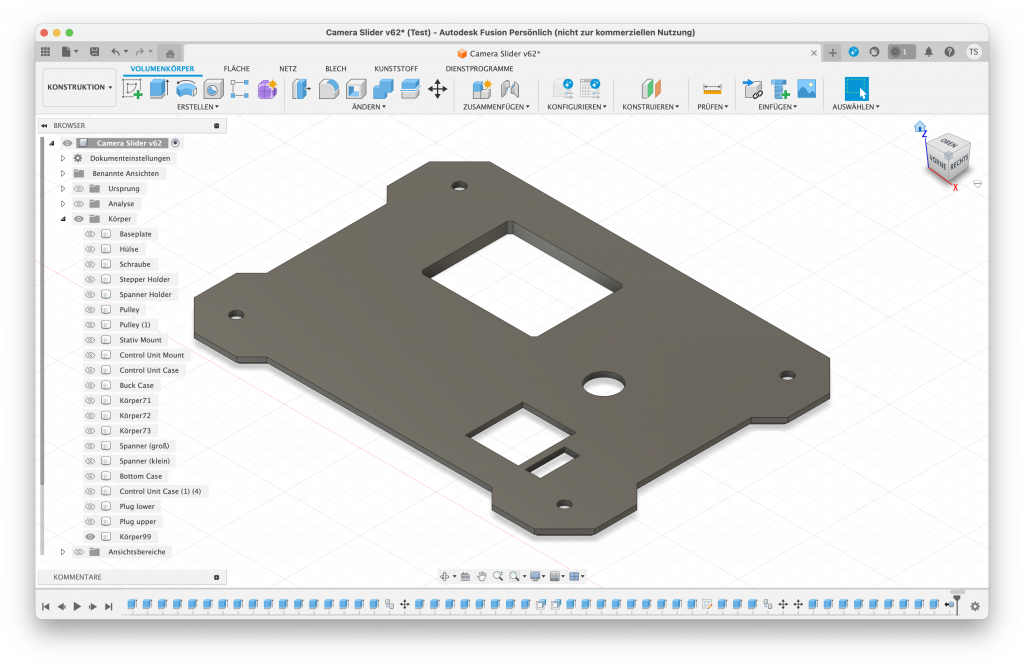
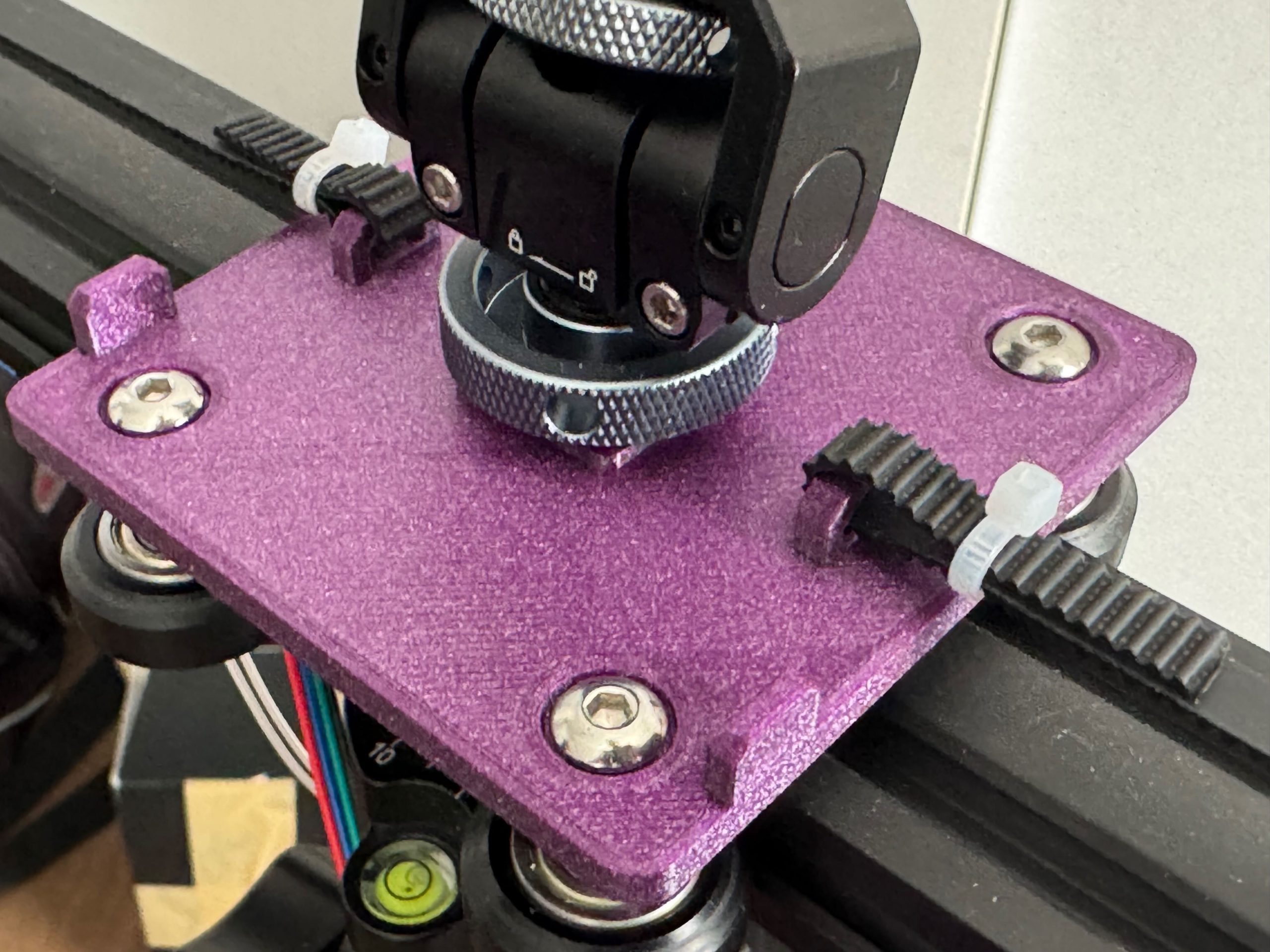
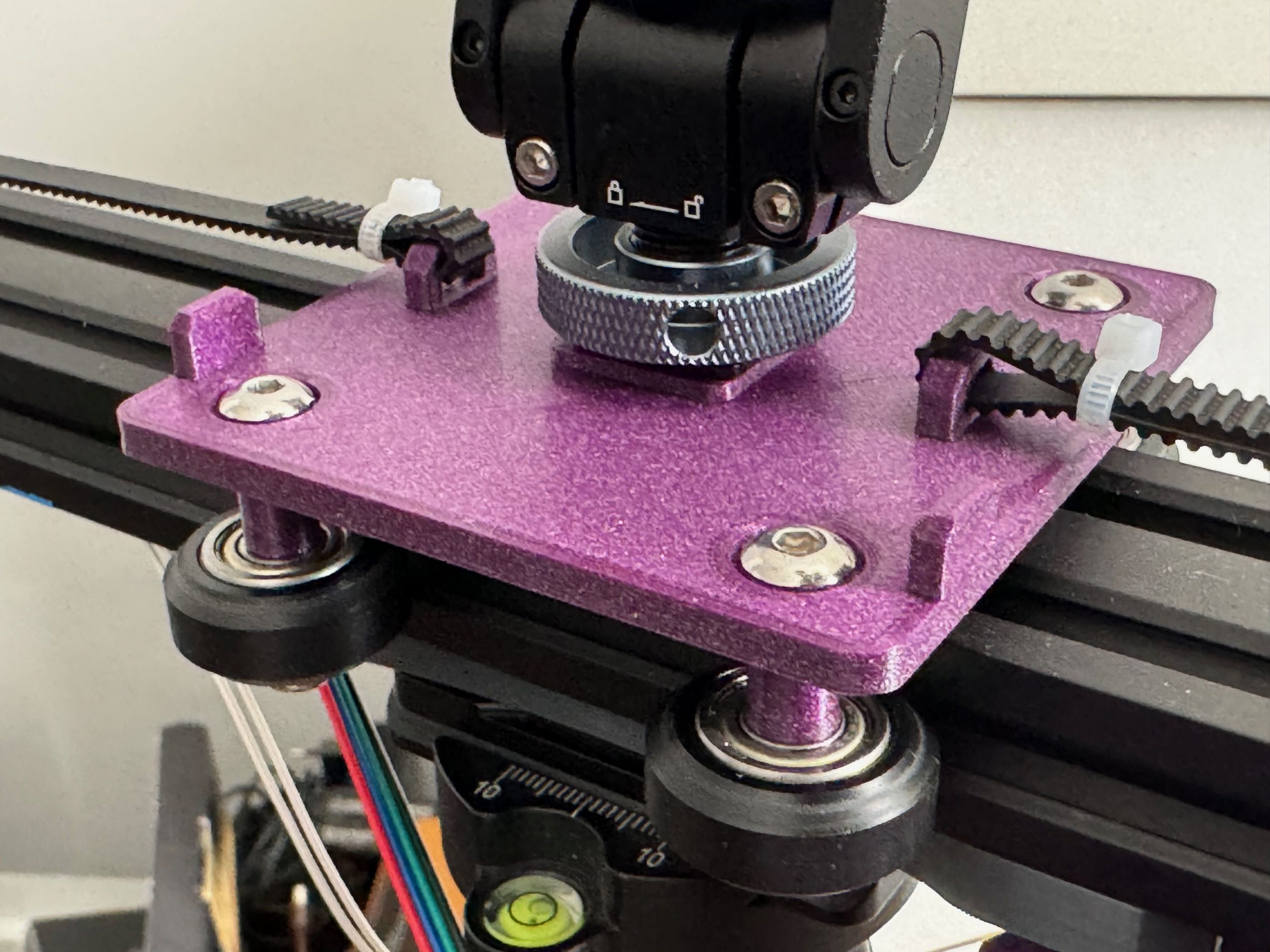
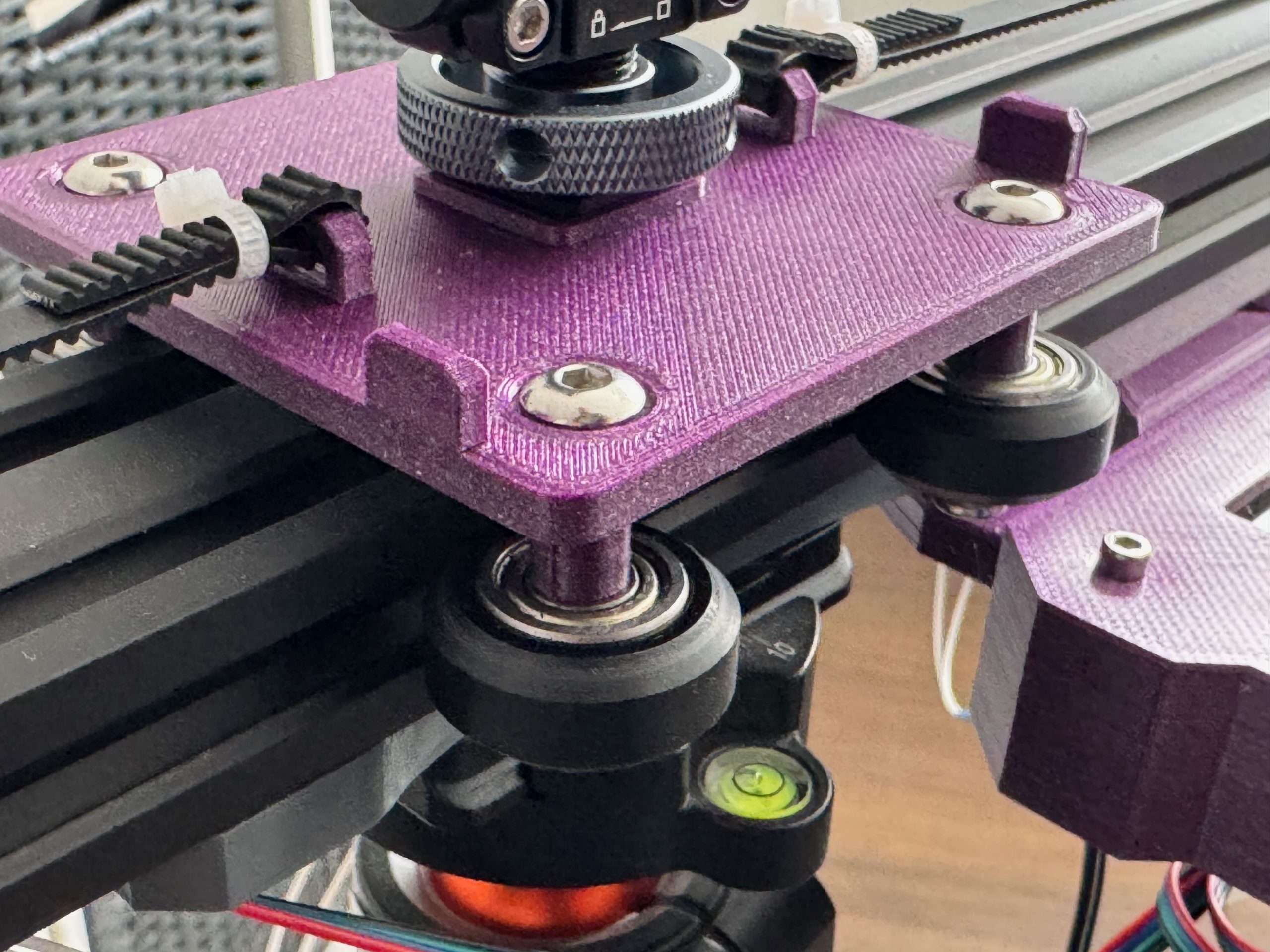
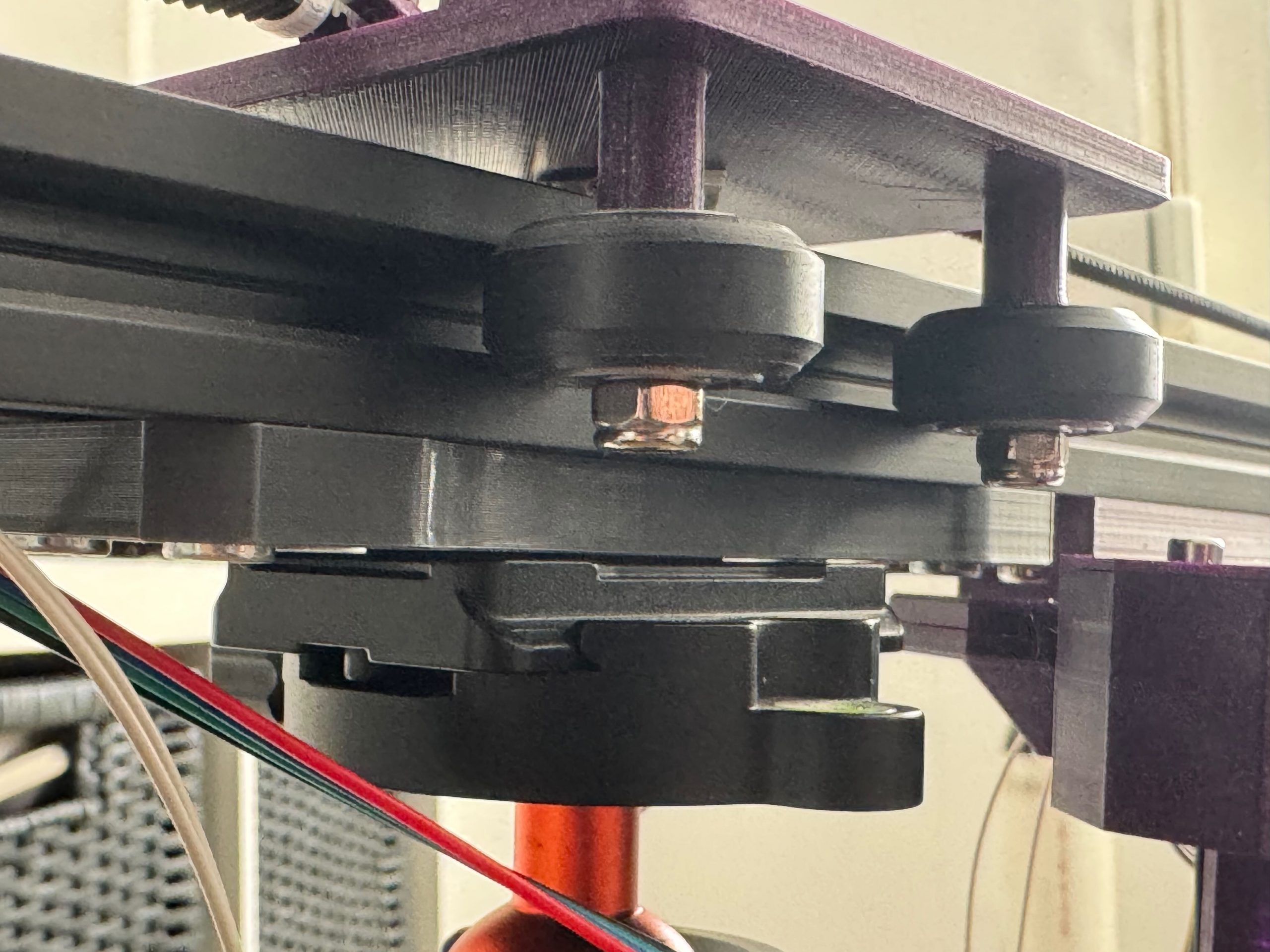
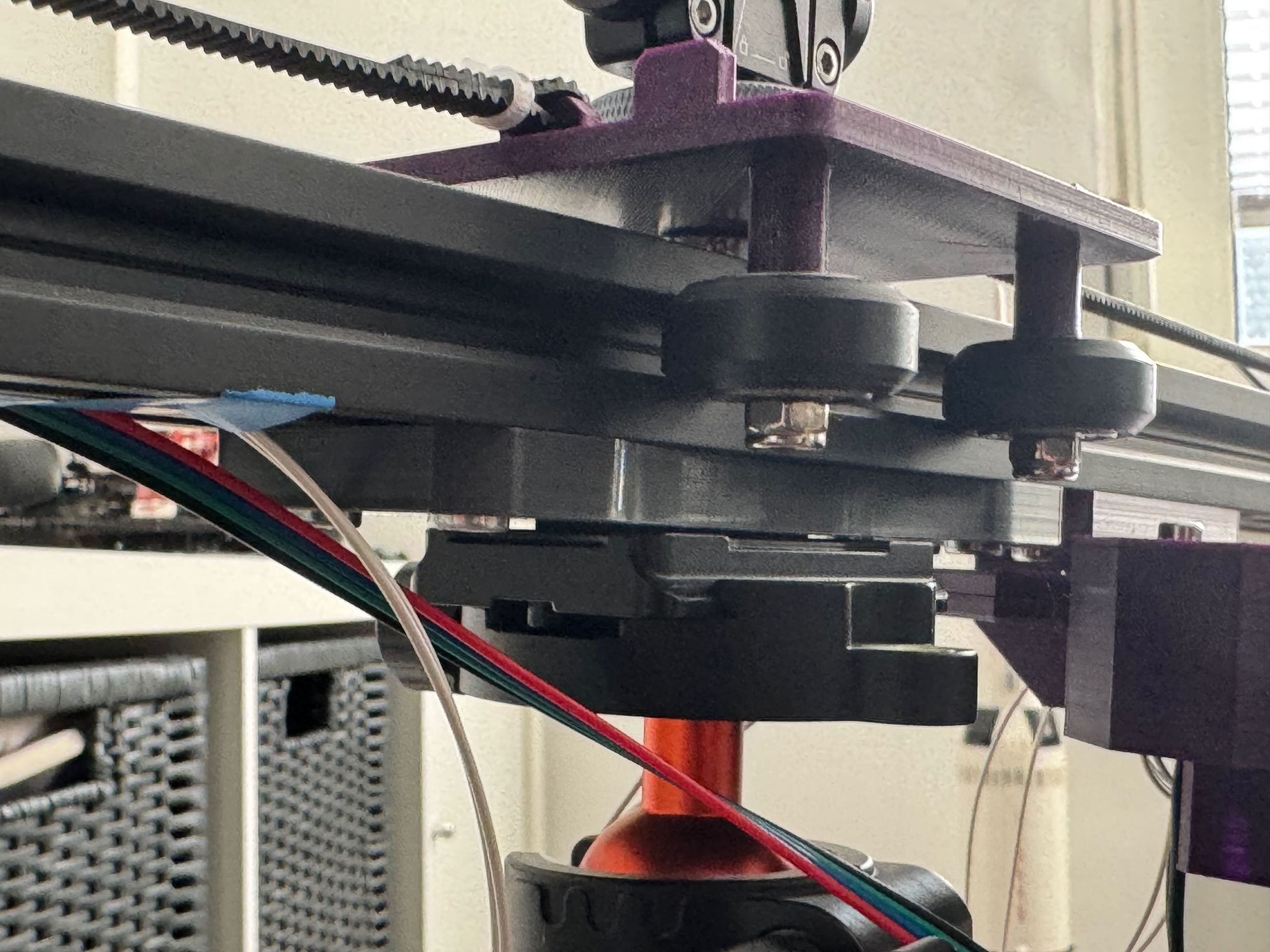
Baseplate
Das ist der der Schlitten, auf dem dann ein Mobiltelefon (in passender Halterung) monitiert werden kann.
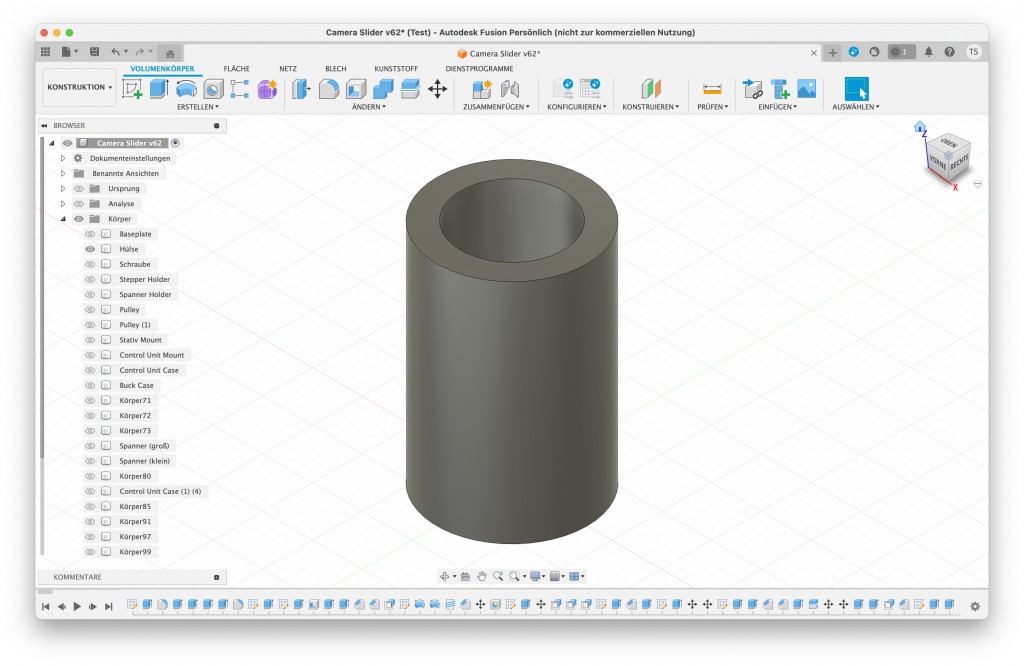
Hülse
Hiervon braucht es 4 Stück. Sie dienen als Abstandshalter zwischen Baseplate und den Rollen. Die Schrauben werden durchgeführt, die Rollen von unten aufgeschoben und dann wird alles mit einer selbstsichernden Mutter festgezogen.
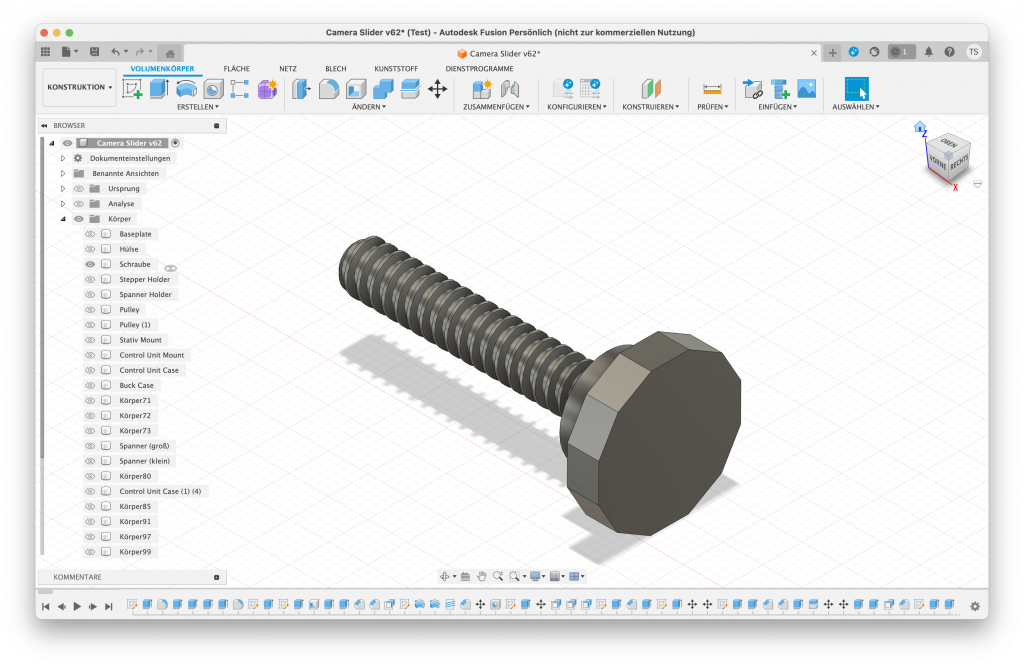
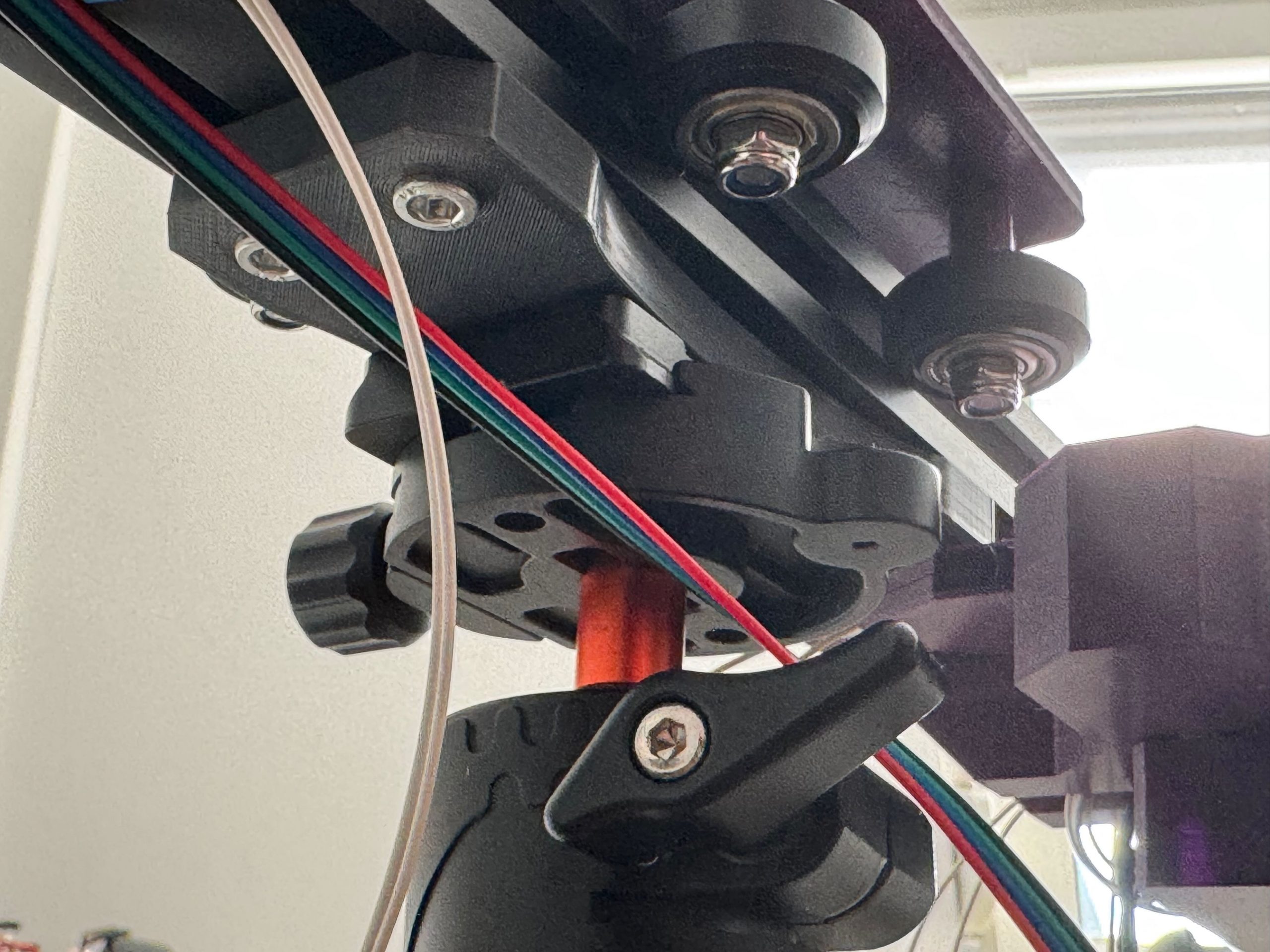
Schraube
Diese übergroße Schraube dient dazu, den Riemenspanner auf Spannung zu halten.
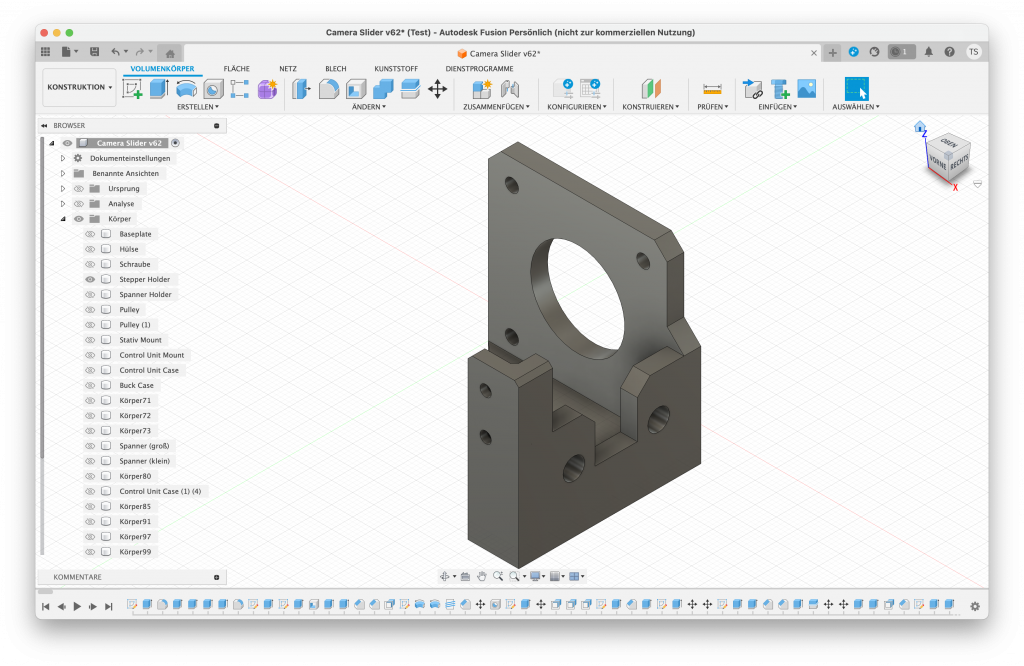
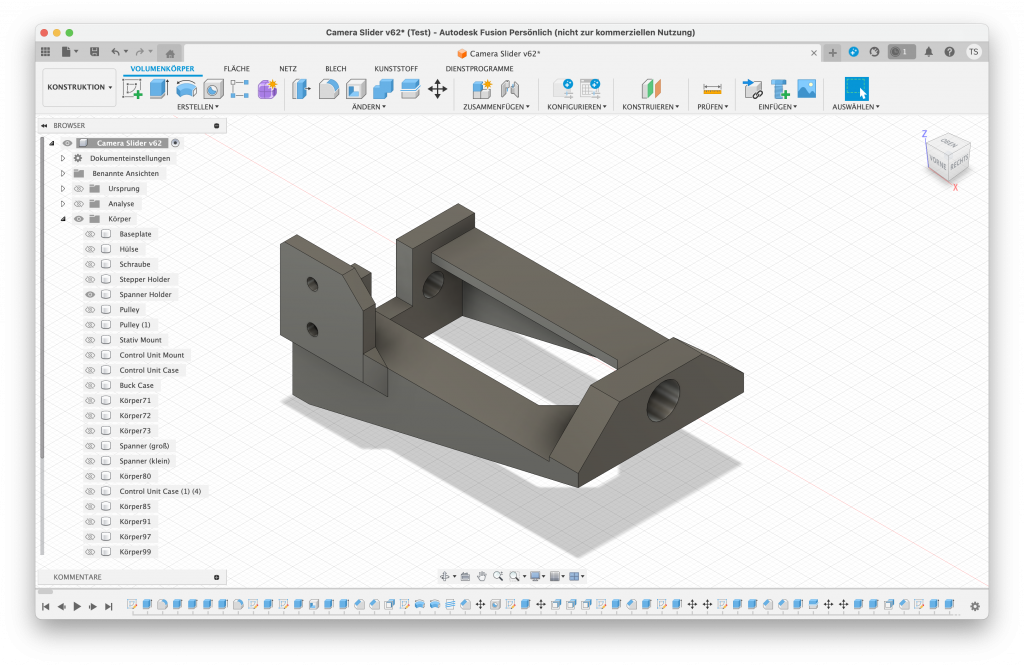
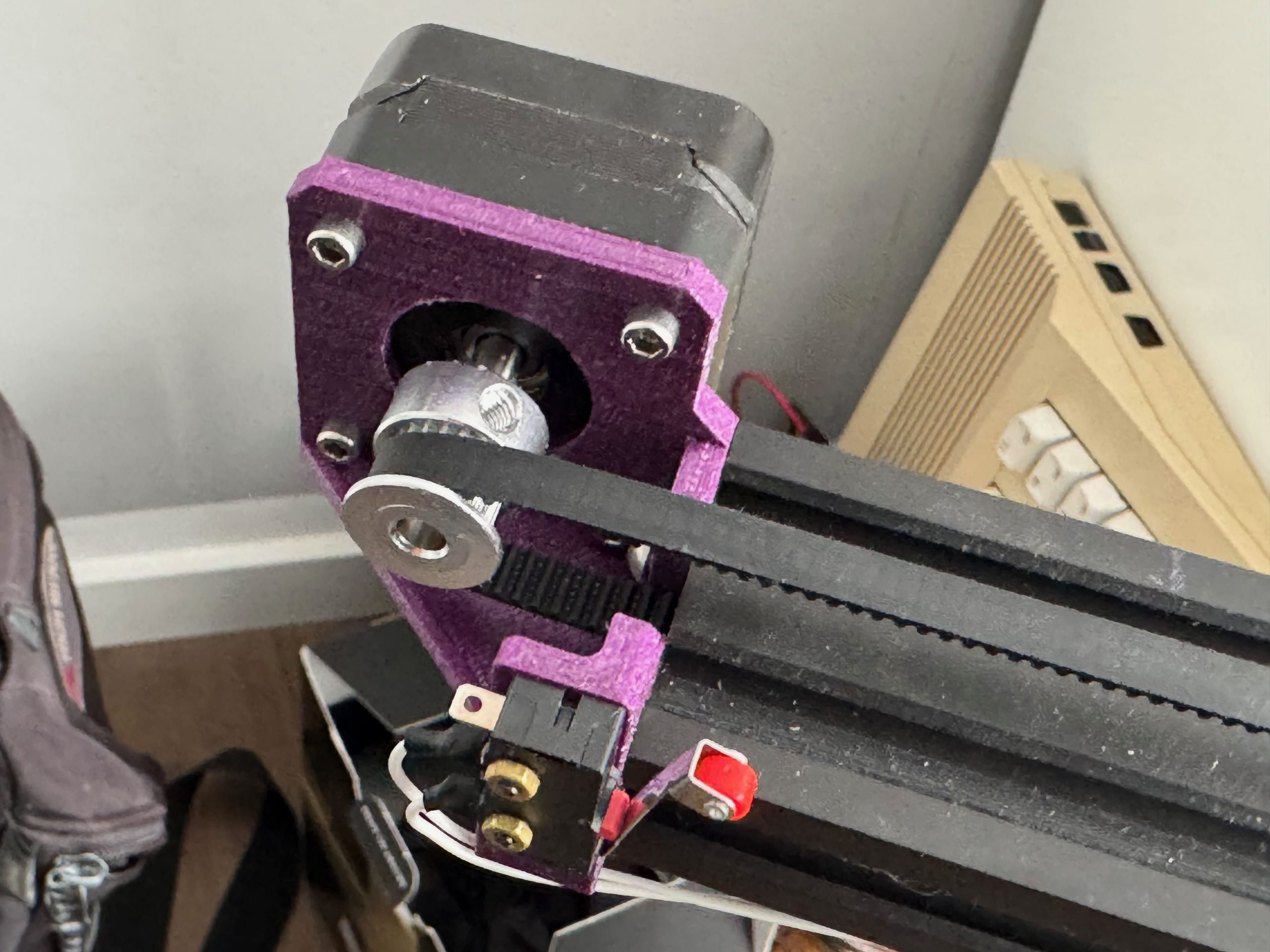
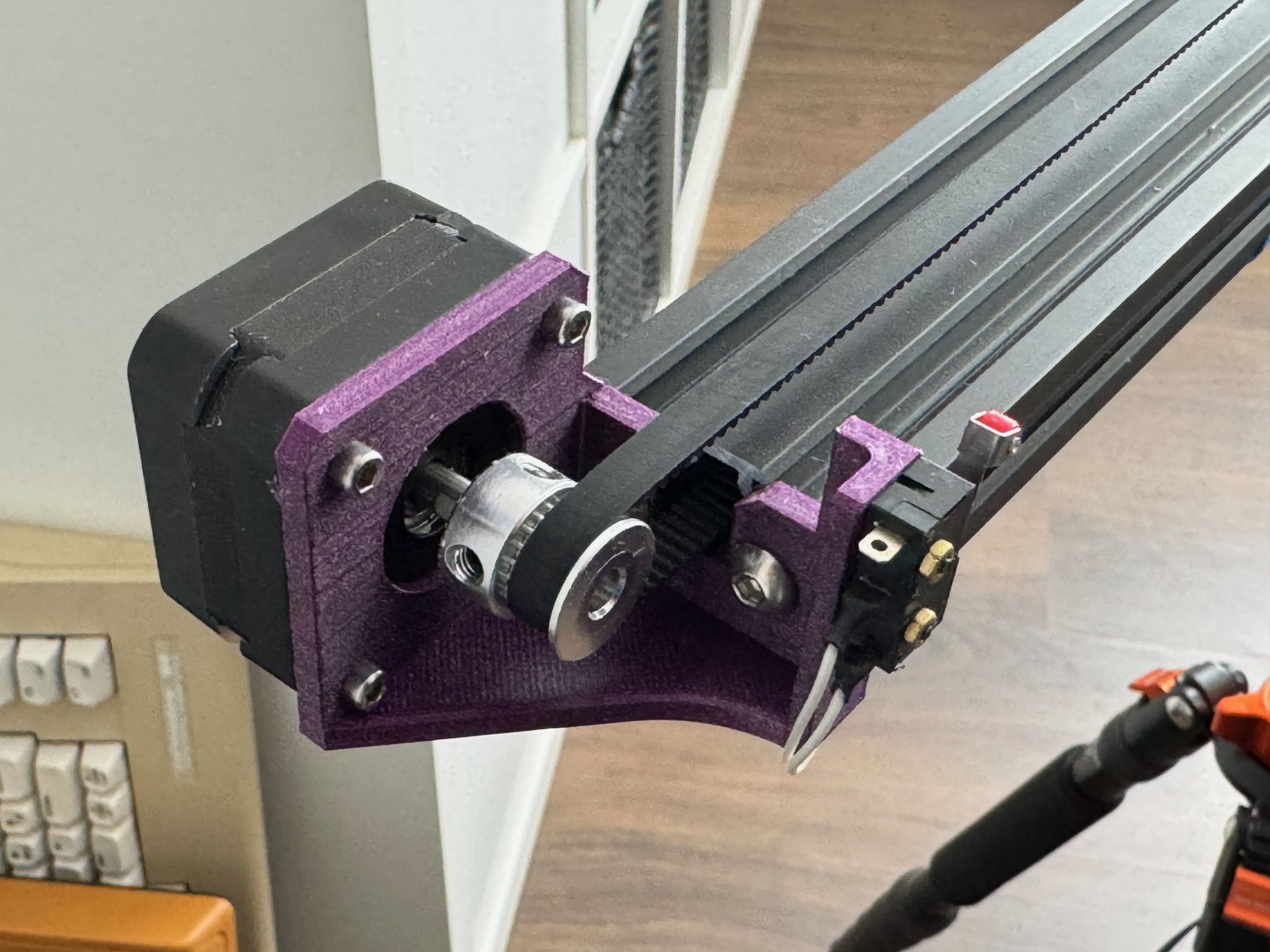
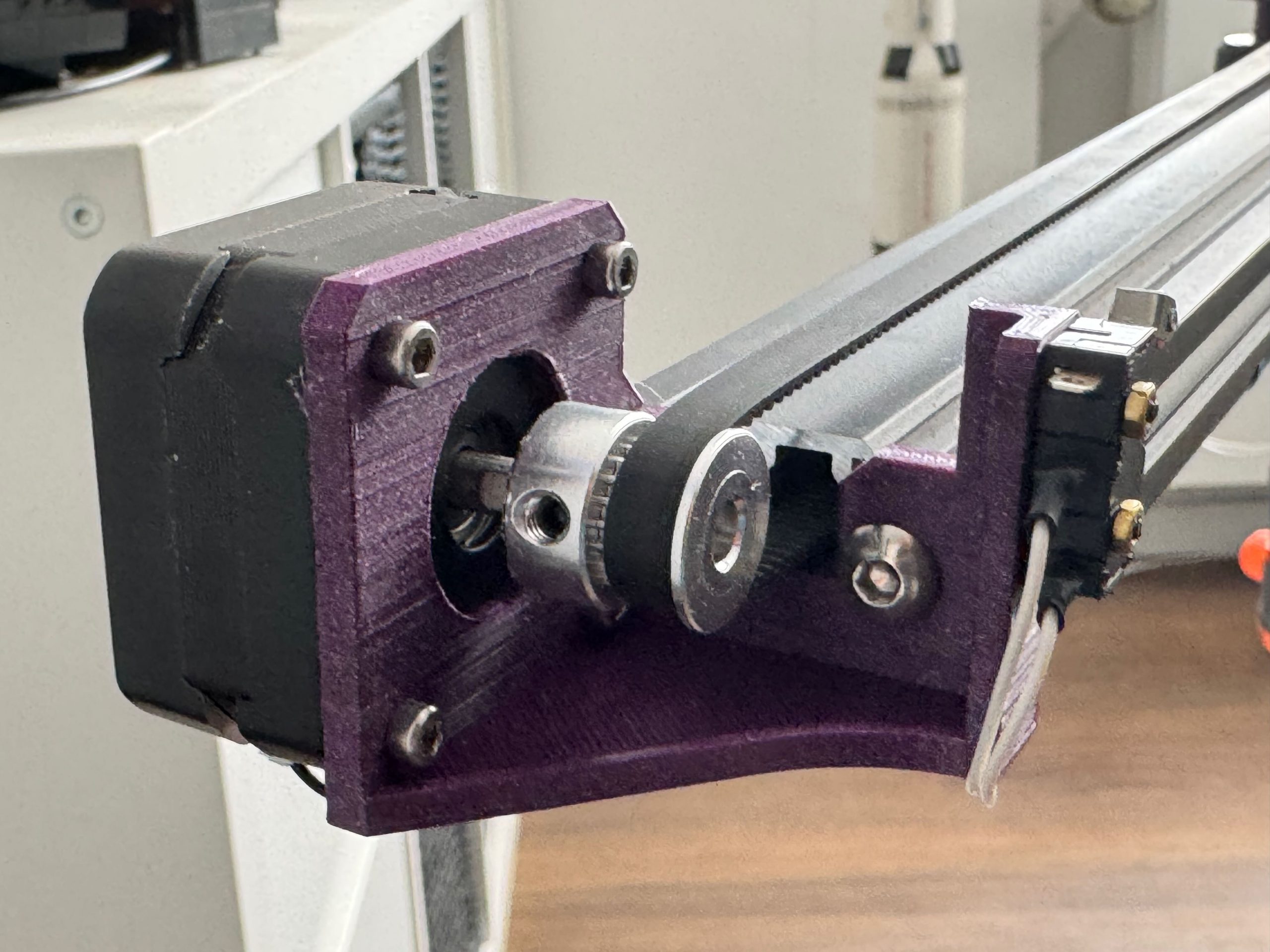
Stepper Holder
Wird ans eine Ende des Steppers gebaut und mit 2 Schrauben festgezurrt. Wenn das Aluprofil kein Gewinde hat, muss dieses erst noch geschnitten werden. Auf der einen Seite kann dann der Nema 17 befestigt werden, auf der anderen Seite sind 2 Löcher um einen der Mikroschalter zu befestigen.
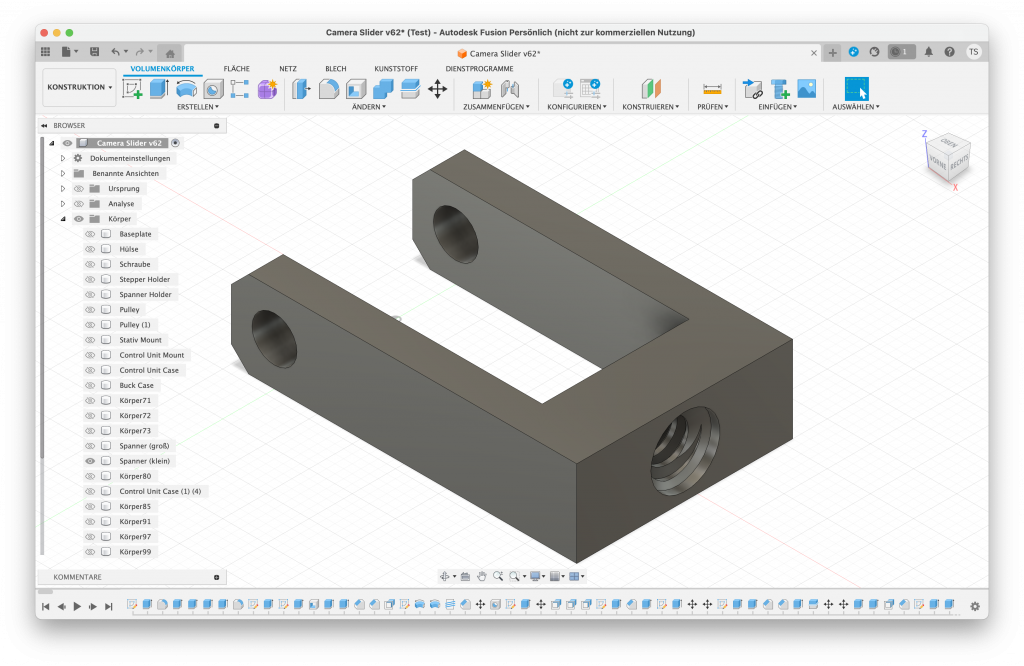
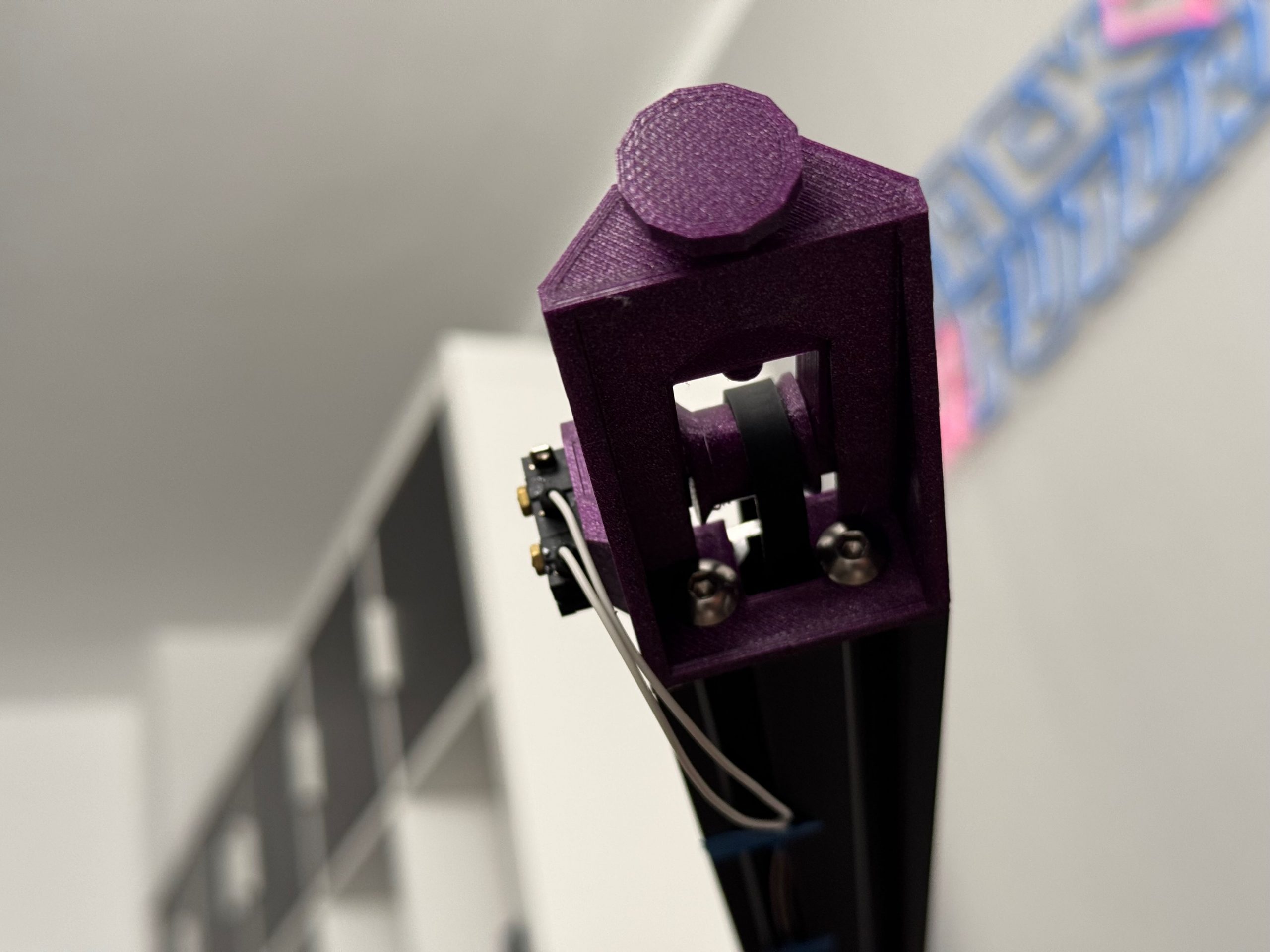
Spanner Holder
Das Gegenstück zur Seite mit dem Motor: Hier wird die Schraube und der Spanner eingesetzt, sowie der Pulley. Außerdem befinden sich erneut 2 Löcher an der Seite zur Befestigung des 2. Mikroschalters.
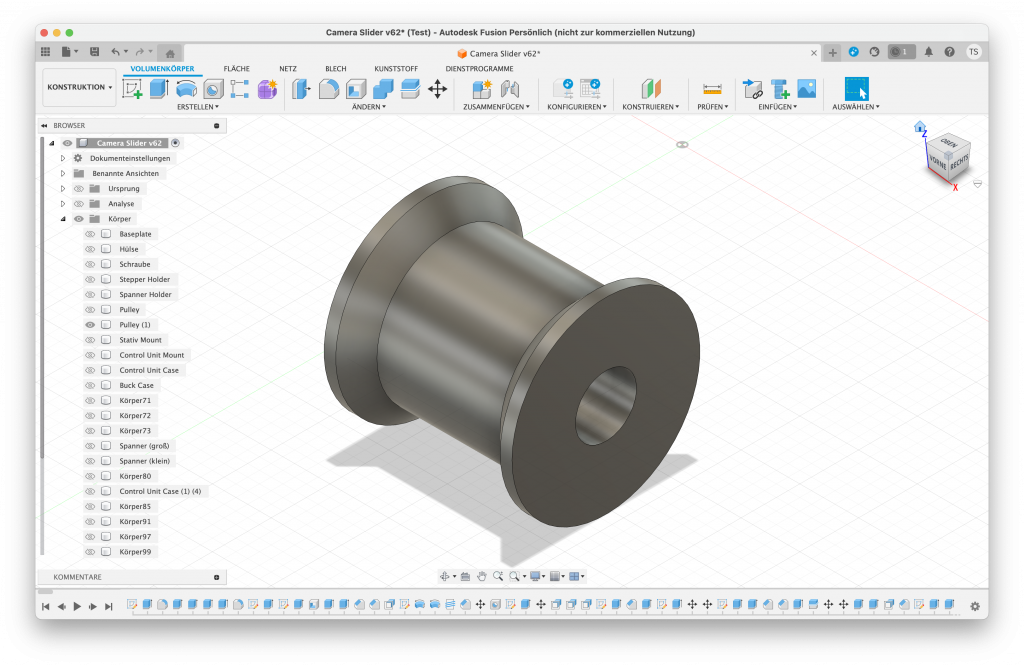
Pulley
Die Rolle über die der Riemen auf der Seite mit dem Spanner geführt wird.
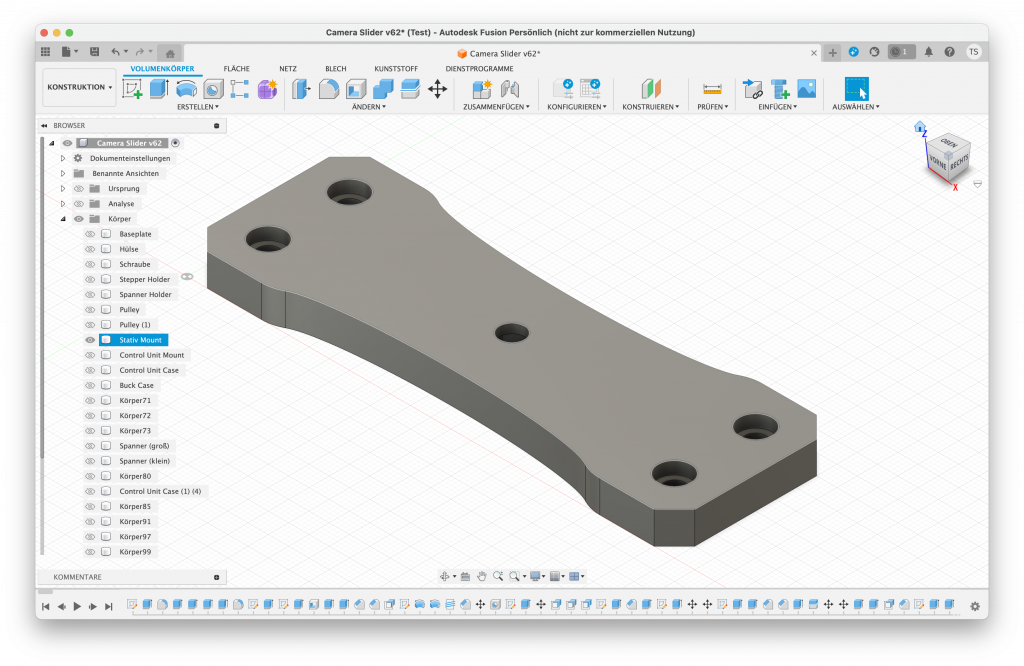
Stativ Mount
Hiermit kann das Aluprofil zusammen mit 4 Nutsteinen und den passenden Schrauben auf einem normalen Stativ befestigt werden. Dazu wird noch eine 1/4″ Mutter benötigt, die einfach mittig in das 3D-Teil eingelegt wird.
Spanner
Dient als Halterung um den Riemen auf Spannung zu halten: Am einen Ende wird die Schraube eingeführt, durch die die Spannung aufgebaut werden kann. Die beiden Arme halten den Pulley, der mit einer Schraube und selbstsichernder Mutter festgehalten wird.
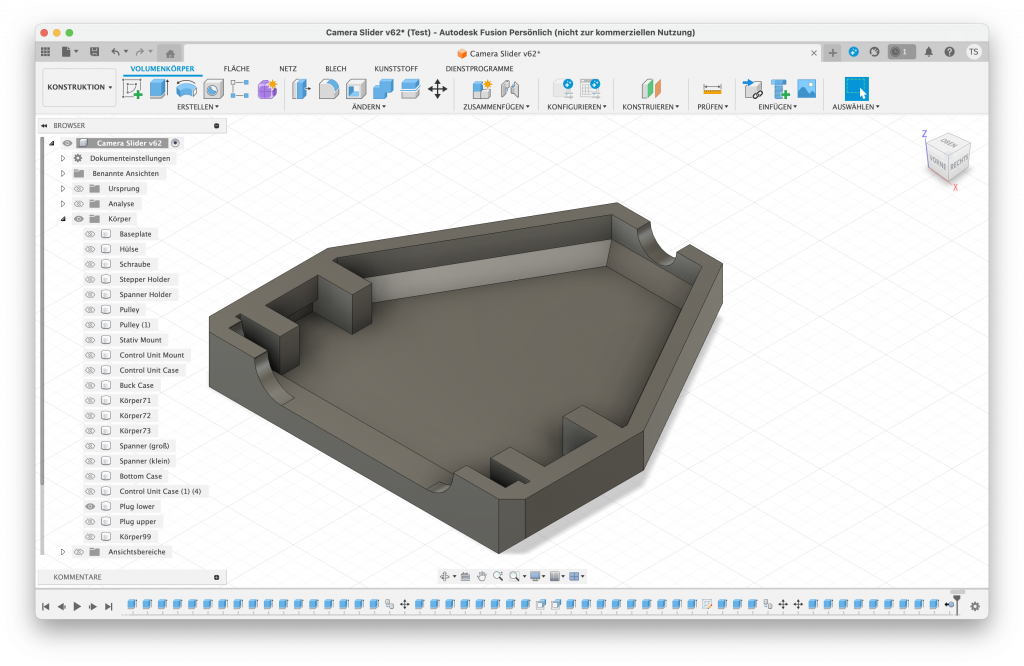
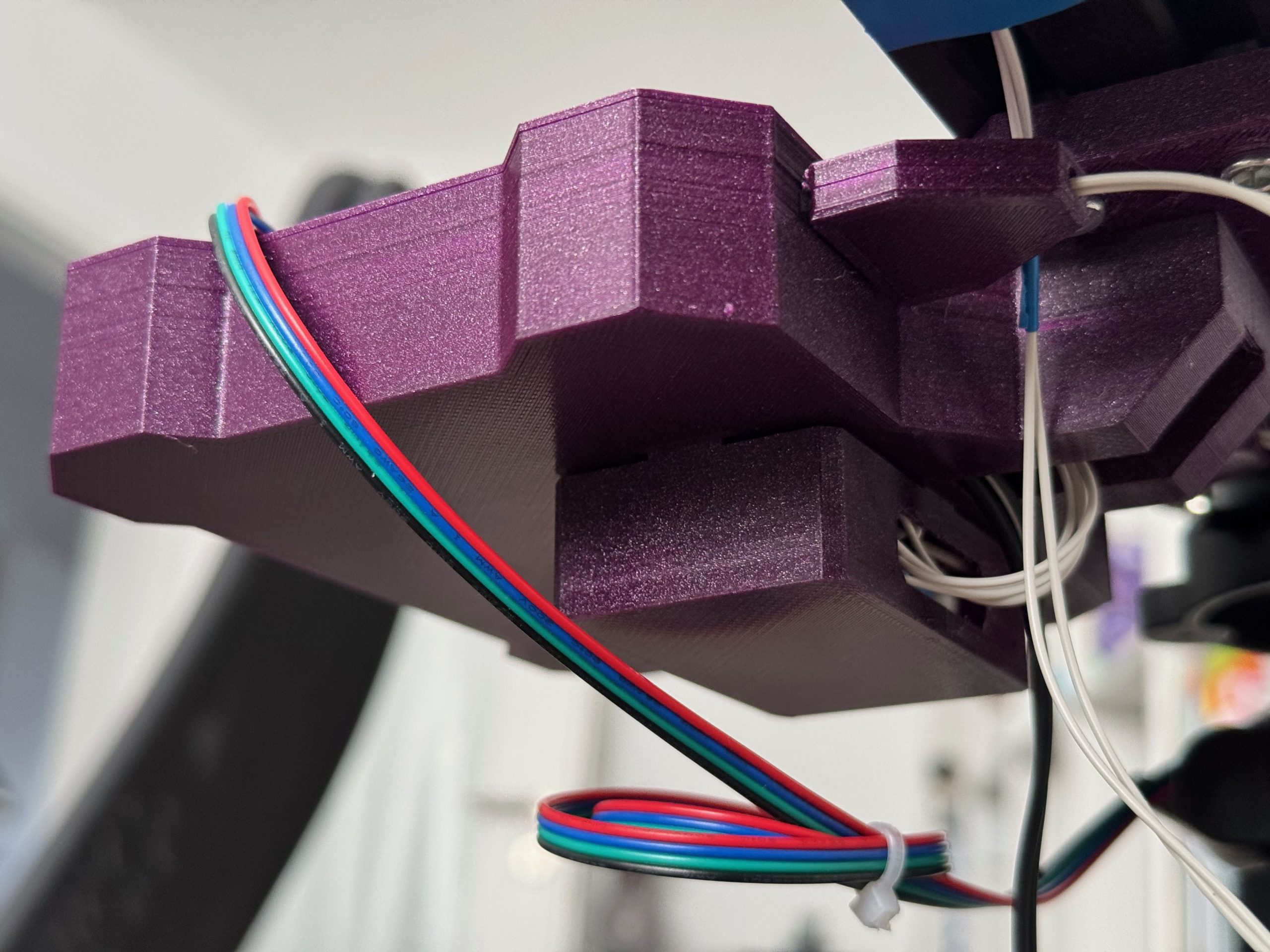
Bottom Case
Da der Motor 12V Spannung benötigt verwende ich ein 12V-Netzzeil. Ein Buck-Konverter macht daraus 5V für das ESP32-Board. Um Platz zu sparen, habe ich mich für diese Plugin-Lösung entschieden. Der Buck-Konverter wird hier eingelegt und dann unter das Control Unit-Case geklippt.
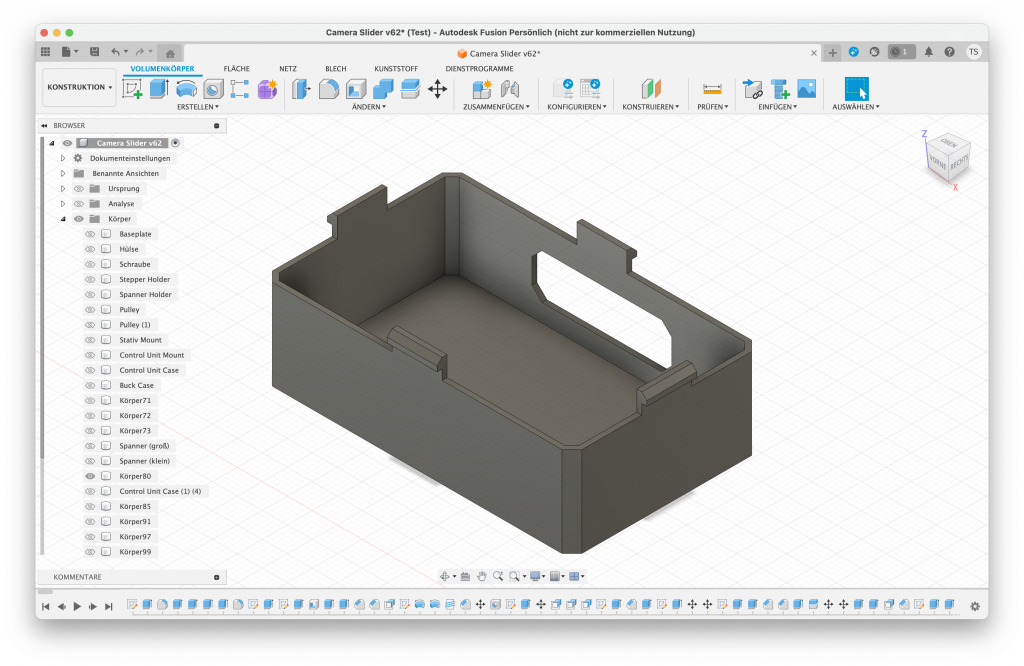
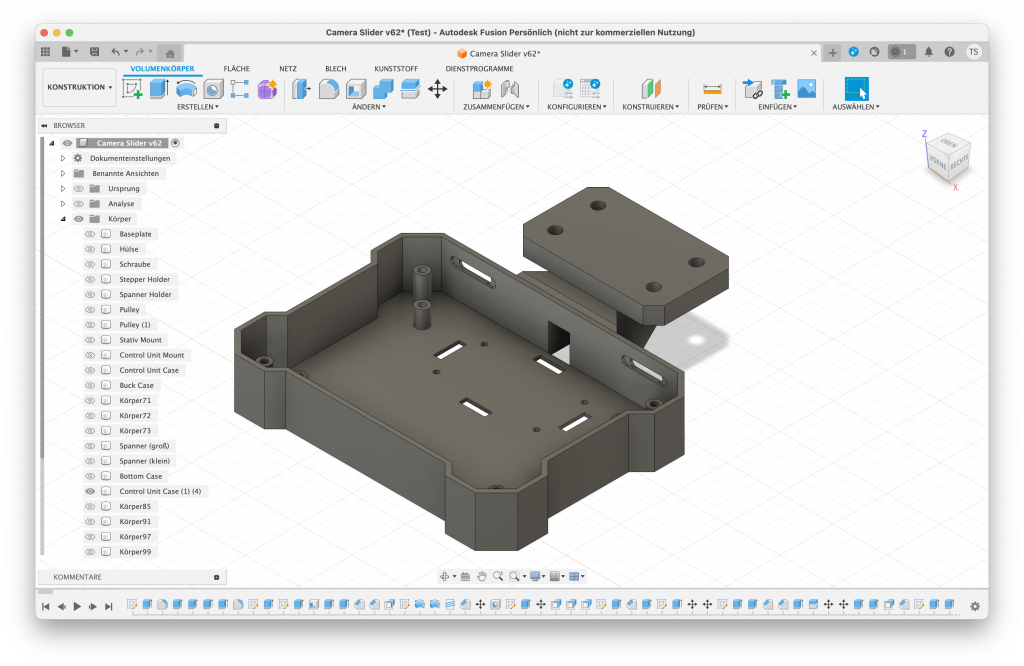
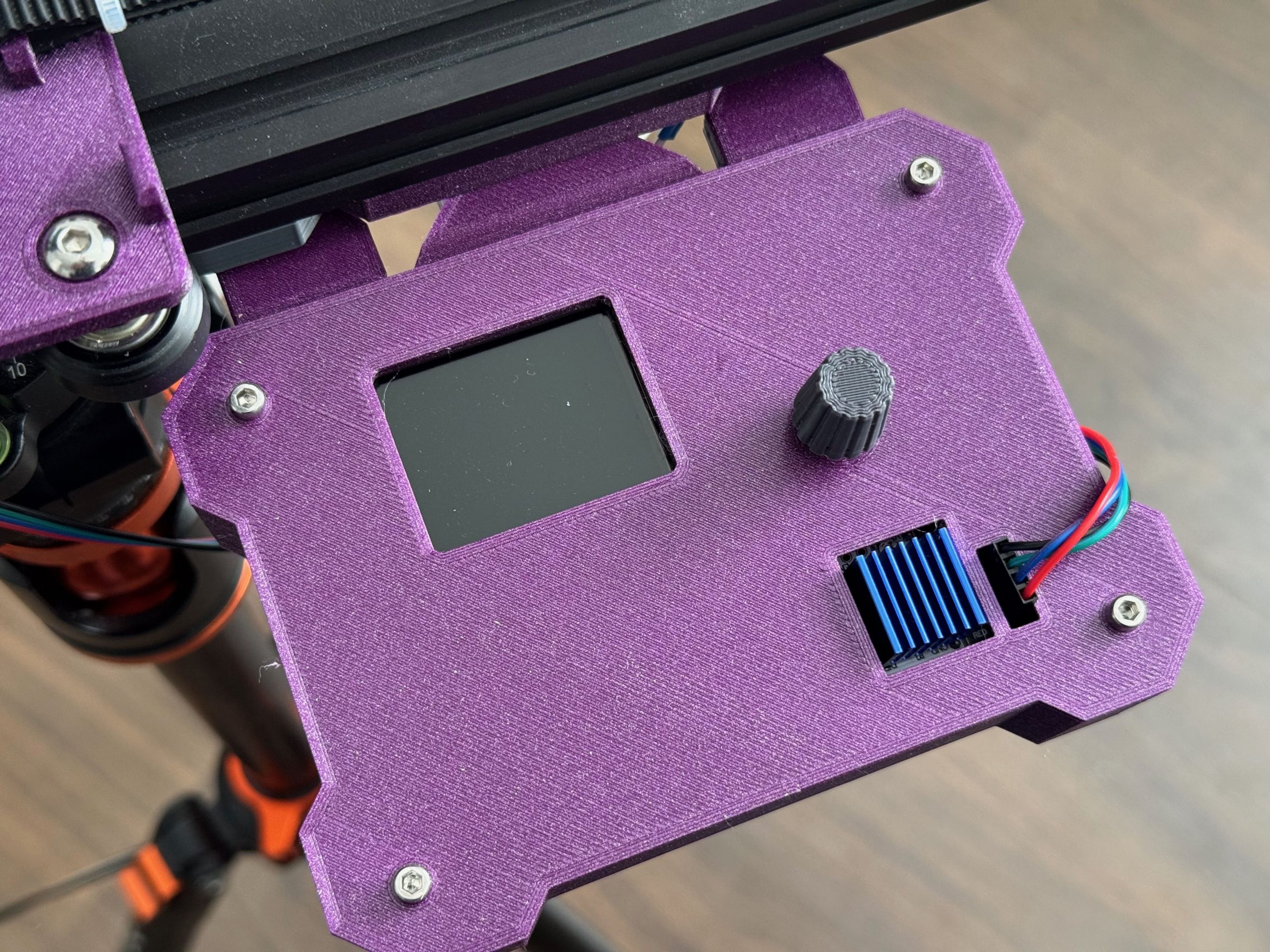
Control Unit Case
Das Gehäuse bietet ein sicheres Zuhause für das Custom PCB. Außerdem kann es von unten mit 4 Nutsteinen samt schrauben von unten am Aluprofil befestigt werden. Oben befindet sich eine Öffnung um die Kabel raus- bzw. reinzuführen. Auf der Hinterseite befinden sich Öffnungen für 2 Magentkontakte, über die die Mikroschalter angeschlossen werden.
Plug lower
Um den Magnetschaltern ein Zuhause zu geben, habe ich dieses Gehäuse entworfen: Unterseite
Plug upper
Um den Magnetschaltern ein Zuhause zu geben, habe ich dieses Gehäuse entworfen: Oberseite
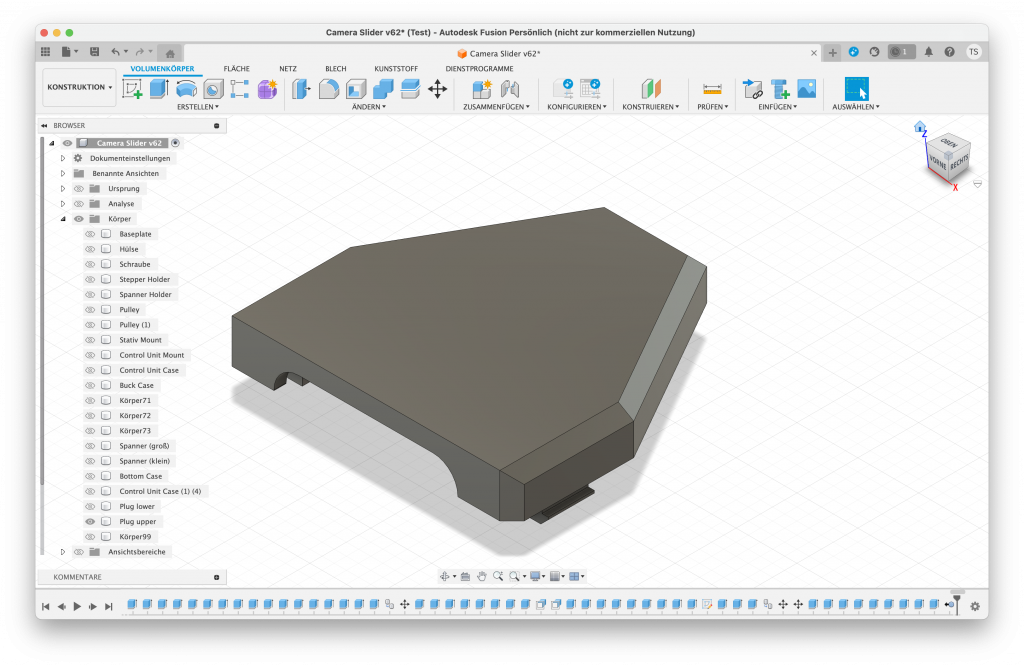
Cover
Die Abdeckung für die Steuereinheit. Hat Aussparungen für Display, Rotary Encoder, Kühlkörper und Motoransteuerung.
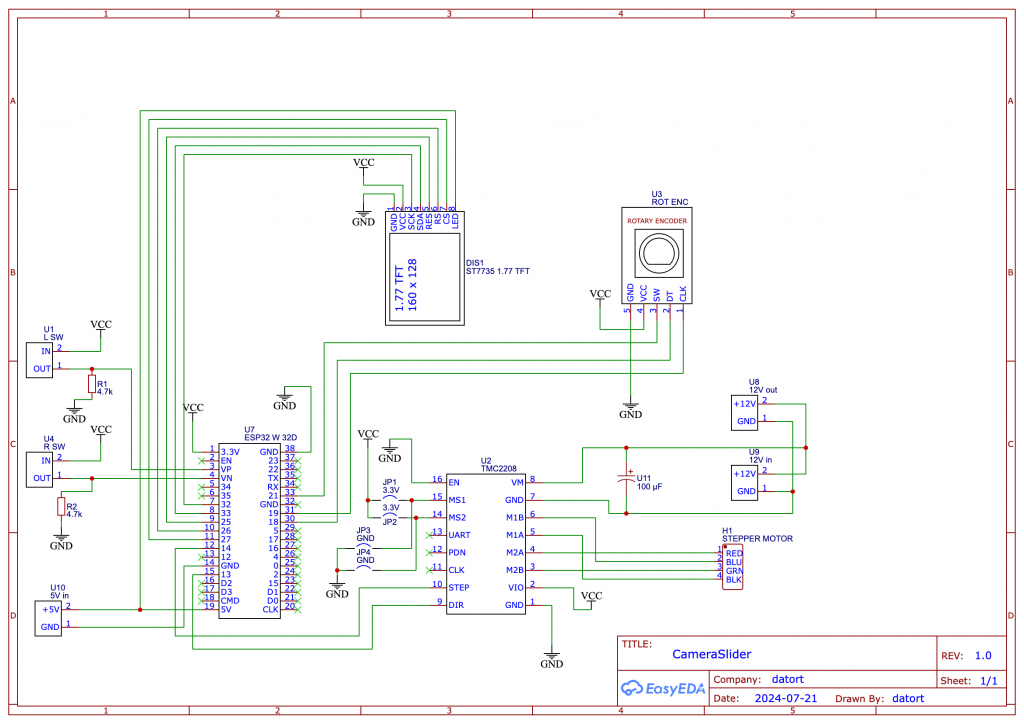
Die Schaltung
Im Video hab ich es erwähnt: Ich bin immer wieder fasziniert davon, wie günstig man heute qualitativ hochwertige, selbst erstellte PCBs bestellen kann. Wenn ihr selbiges tun möchtet, biete ich euch hier gerne das Gerber-File ein, mit dem ich beim Hersteller eurer Wahl bestellen könnt. Für alle, die lieber selbst die einzelnen Komponenten verlöten möchten (so viele sind es ja am Ende nicht) haue ich hier aber auch einen Schaltplan rein.
Beachtet: Wenn ihr die Schaltung nachbaut, macht ihr das auf eigene Gefahr!
Lest bitte auch folgende Hinweise!
Hinweis: Anders als im Schaltplan angegeben, habe ich noch eine Sperrdiode zwischen die 5V (im Schaltplan U10) und den daran angeschlossenen Buck-Converter gesetzt um sicher zu sein, dass die 5V auch nur in Richtung des ESP32-Boards fließen. Ohne die kann es sein, dass der Strom über das ESP32-Board zurück in Richtung Stepper-Treiber fließt und das Board oder die dahinter befindliche Stromquelle überlastet!
Hinweis 2: Das ganze ist ein Hobby für mich, ich hab den Kram nicht gelernt. An der Schaltung kann mit Sicherheit einiges optimiert werden. Ich kann nicht garantieren, dass das alles sicher umgesetzt ist. Ich bin für konstruktives Feedback offen und erinnere: Wenn ihr das nachbaut, macht ihr das auf eigene Gefahr!
Die Software
Bei dem Projekt handelt es sich um ein Arduino-Projekt welches mit PlatformIO entwickelt wurde. Entsprechend sind die verwendeten Bibliotheken in der Konfiguration des Projekts enthalten. Ihr könnt euch das Projekt von meinem Github-Account ziehen, lokal mit PlatformIO bauen und auf das ESP32-Board flashen. Ein fertiger Build, wie ich das bei anderen Projekten teils anbiete, existiert hier leider bisher nicht.
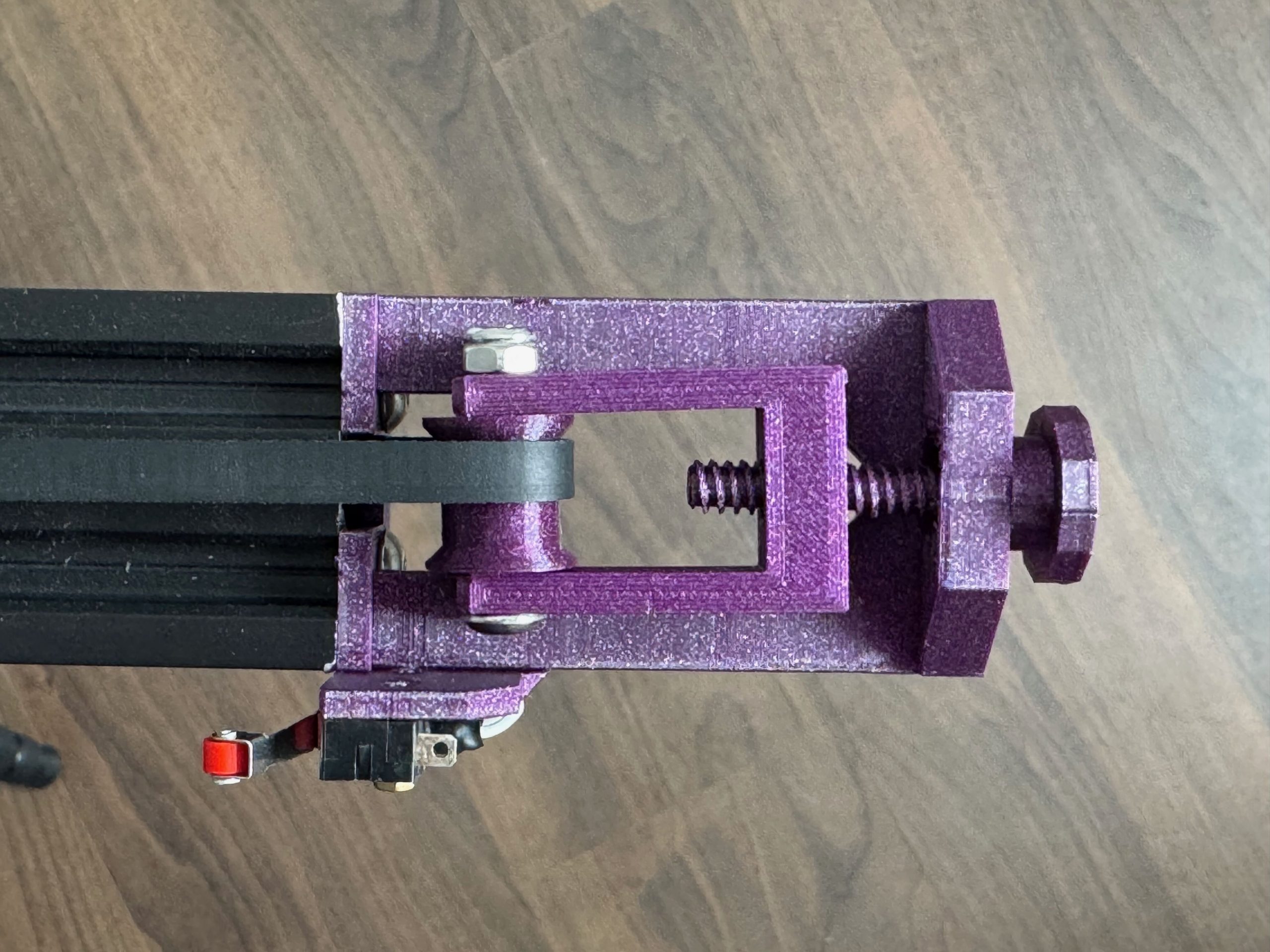
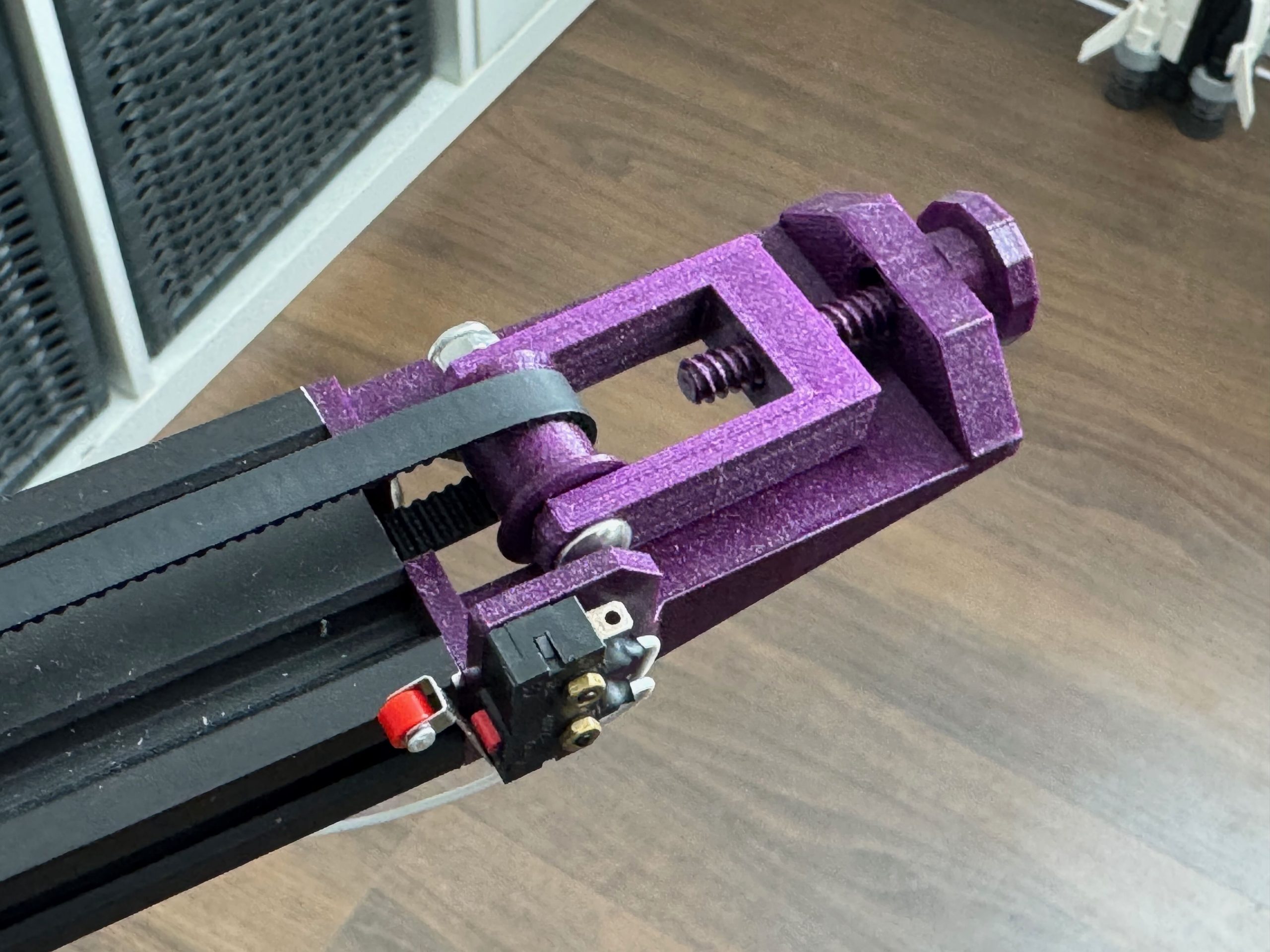
Bilder: Im Detail
Bilder sagen oft mehr als tausend Worte. Insbesondere wenn man ein etwas umfangreicheres Projekt wie dieses vor der Brust hat und keine Step-by-Step-Anleitung geliefert bekommt. Deshalb habe ich den Slider an allen Ecken einmal im Detail abfotografiert.


Fazit
Ihr merkt, das Ganze ist kein 08/15-Projekt welches man mal eben schnell nachbaut. Ihr benötigt so einiges an Komponenten, einen 3D-Drucker und etwas Geduld und Hirnschmalz beim Zusammenbauen. Um ehrlich zu sein: Ich war mir anfangs unsicher, ob ich überhaupt ein Video oder diesen Blogbeitrag zu dem Kamera Slider schreiben will. Habe mich dann aber doch dafür entschieden. Denn vielleicht kann sich der Eine oder die Andere bei der Verwirklichung des eigenen Projekts irgendwas abschauen. Und dann wär es doch bereits ein Erfolg. In dem Sinne, danke für’s Lesen, viel Spaß und vielleicht sieht und ließt man sich ja mal auf meinem YouTube-Kanal.


Moin, ich würde den Slider gerne nachbauen. Sehr gut gemacht.
Wo finde ich die Gerber Datei für das PCB?
Denn wenn ich da selbst etwas generiere passt es hinterher nicht in das Gehäuse.
Mit freundlichen Grüßen Udo Bergler